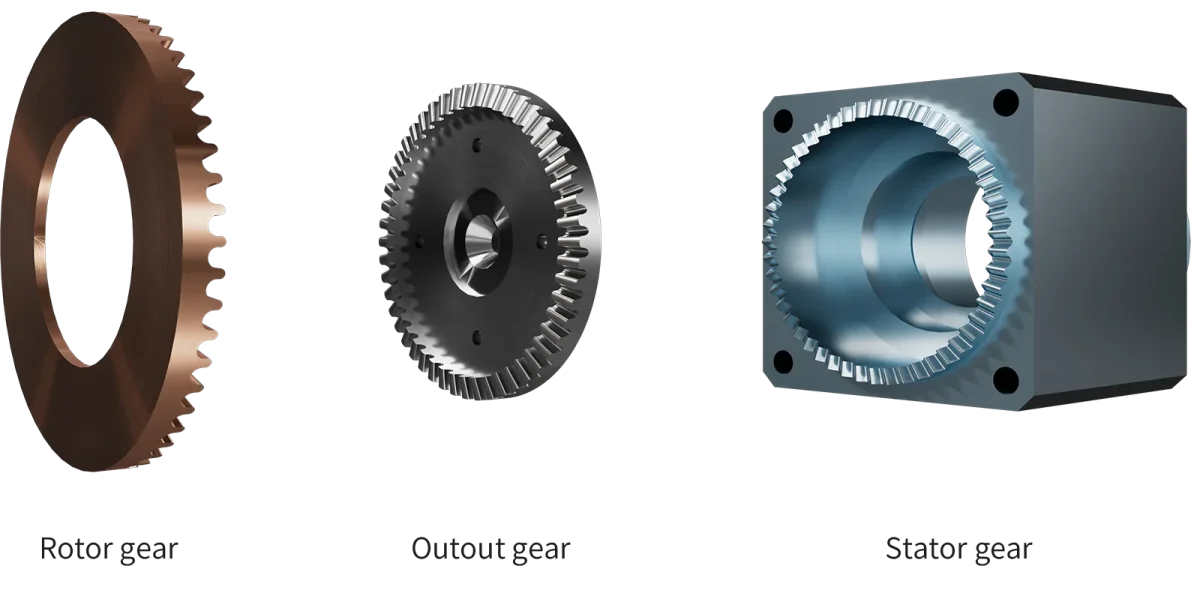
Millimeter-sized precision transmission mechanisms are essential for next-generation robots. Our core technology in the field is the Crown Reduction Mechanism—a simple gear configuration consisting of three rigid gears: the rotor gear, stator gear, and output gear. By utilizing these three crowns, we offer the next-generation compact precision reducer, Crown Roboxgear, as a core component, along with Three-dimensional Cams and compact electric grippers to support a robotic society.
The “robustness” required for precision compact reducers in the era of small robots means powerful torque, high rigidity for shock resistance, and longevity to operate continuously in high-load environments.
Robustness
High Torque
Increased rated torque for the reducer to maximize small motor power (double the torque for the same size)
Shock Resistance
Instantaneous Maximum Torque: 45Nm (for the 30-mm external dimension type)
Longevity
High Load Resistance
Rated Torque: 3Nm (for the 30-mm external dimension type)
Crown Roboxgear Lineup
-
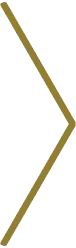
Solid Type
The basic unit, offering greater rigidity than the hollow type, is more cost-effective and can be connected to various motors.
-
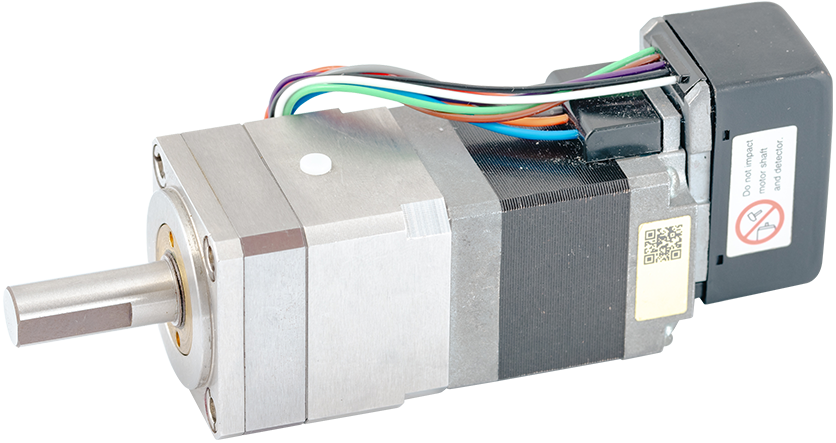
Hollow Type

The rotating shaft is tubular, allowing wiring to pass through the shaft or the hollow hole to be used for connecting other devices, achieving space-saving design.
-
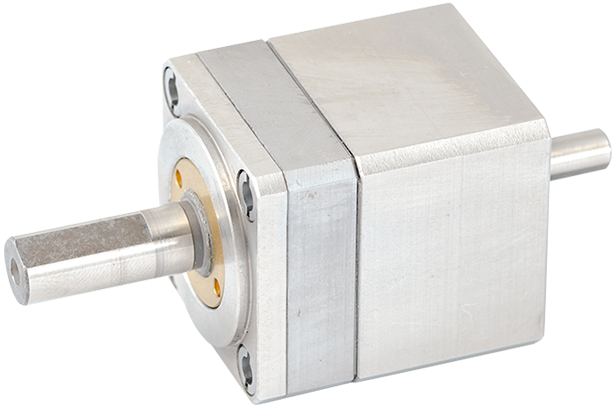
Geared Motor Type
By integrating the motor and the reducer, space-saving and torque optimization are achieved for the entire unit.