A compact, lightweight, high-output electric gripper capable of ultra-precise movements.
With a powerful gripping for ce of 20 N and pr ecision handling of φ0.5 mm. Gripping Without Position Command.
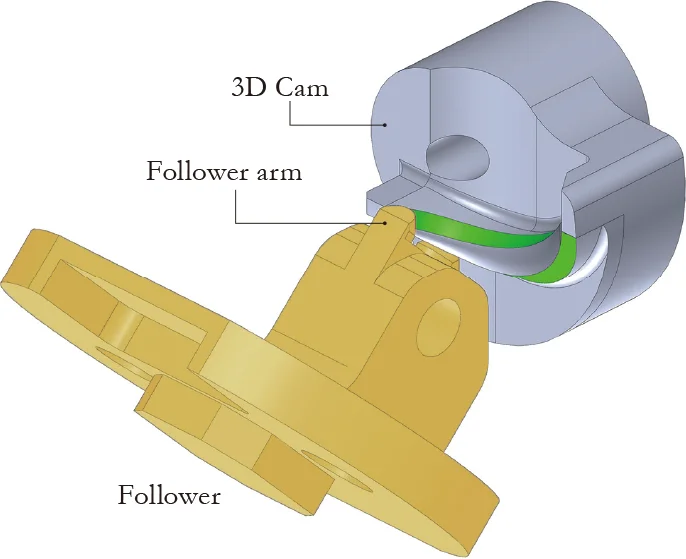
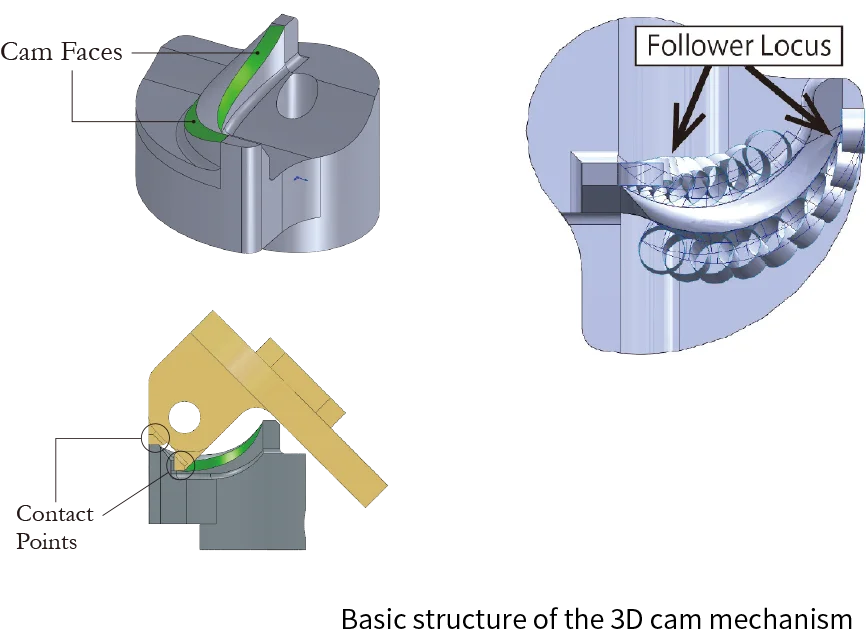
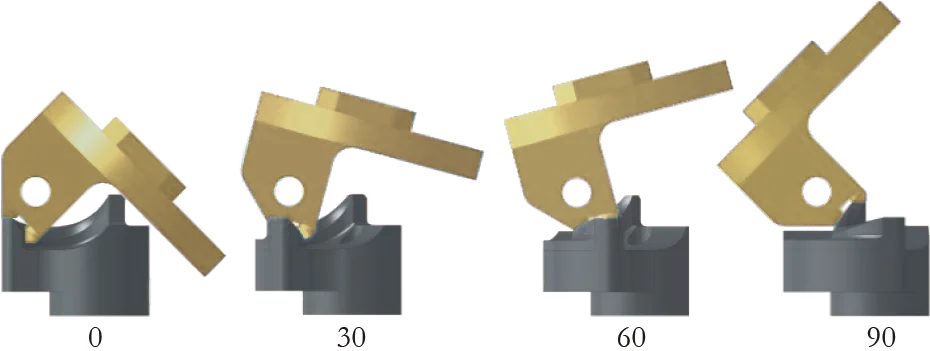
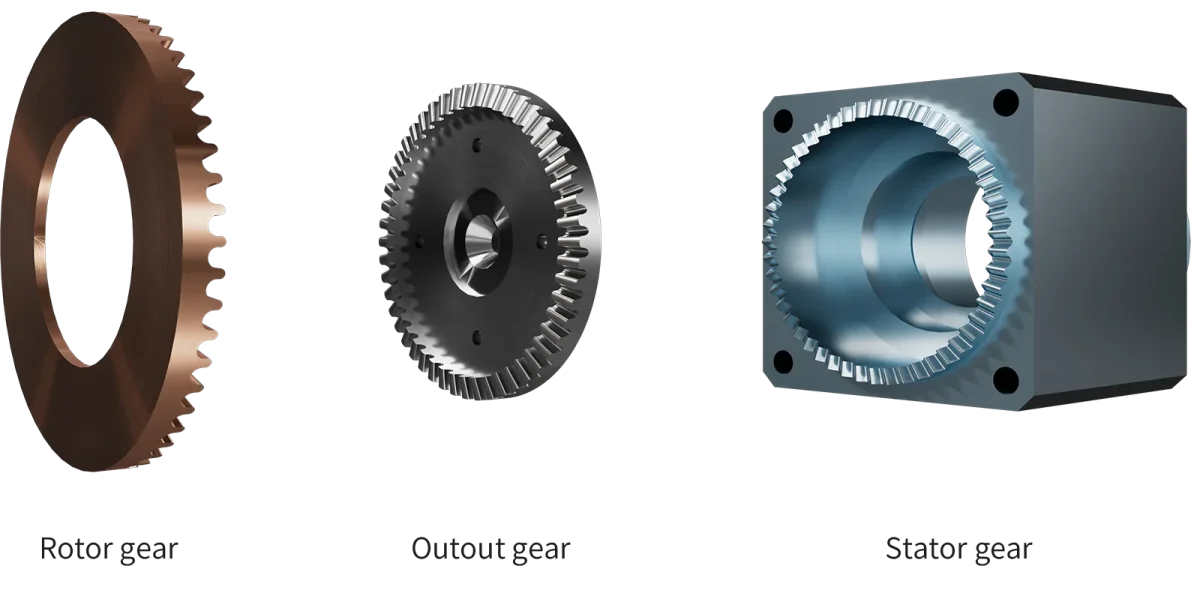
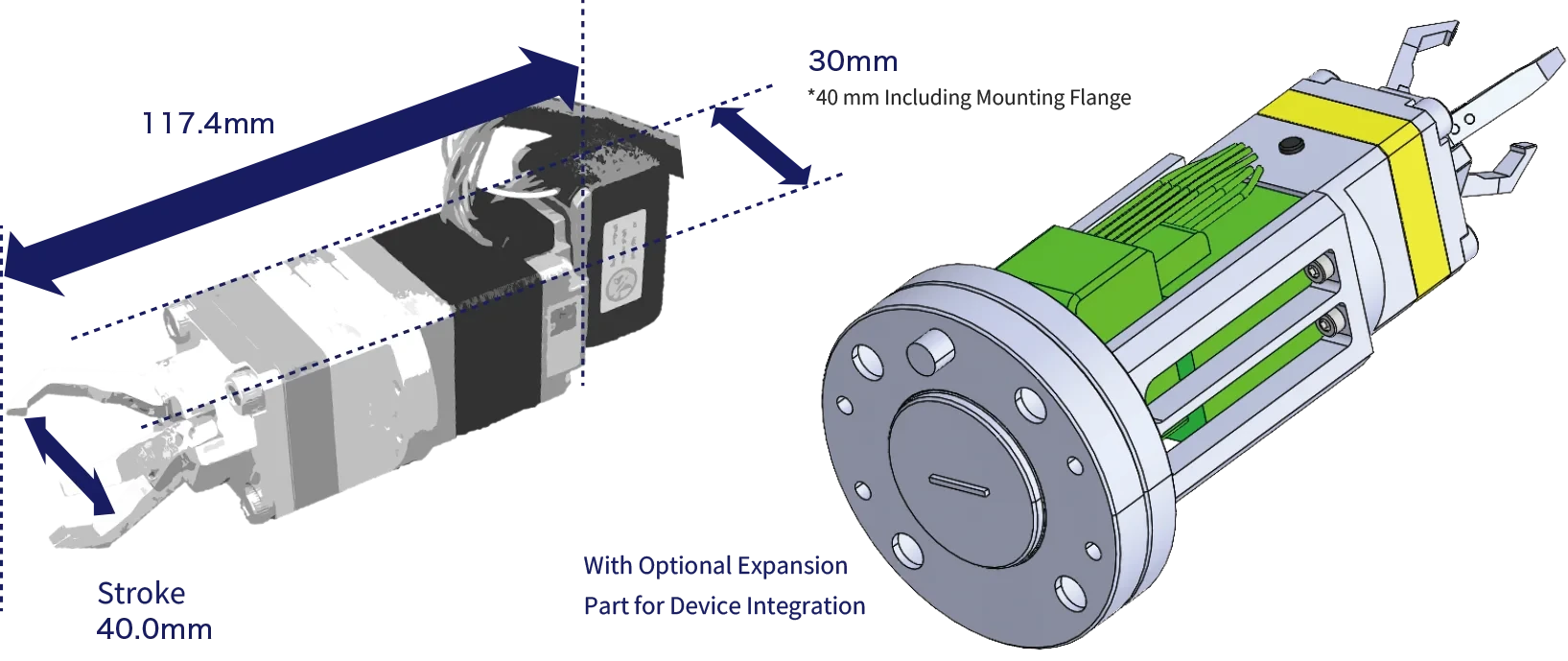
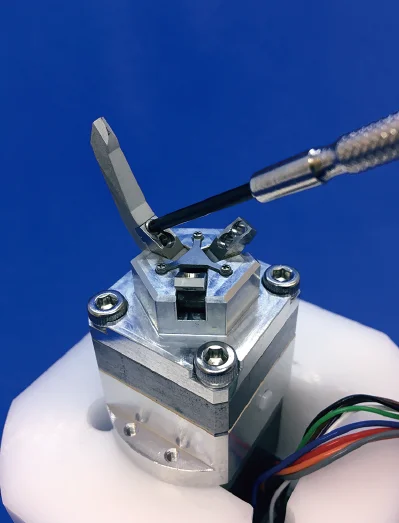
This electric gripper is equipped with a novel three-dimensional cam mechanism and a crown reduction gear. Despite its compact and lightweight body, it can deliver a gripping force of up to 20N and perform delicate operations, such as grasping the 0.5mm lead of a mechanical pencil. Additionally, thanks to its unique mechanism that allows rotational opening and closing from the arm pivot point, the fingertips can extend beyond the body when open and retract within the body when closed.
Gripping Without Position Commands
By utilizing the control functions of the AZ Series motor by Oriental Motor, the gripper can grasp objects without the need for position commands—as long as the object is within the fingertip’s opening and closing range. The motor can be changed upon request.

By combining a 20mm-square three-dimensional cam mechanism with a 30mm-square crown reduction gear, we have achieved a compact design.
The movable stroke of the fingers ensures a 40mm range of motion.
Securely grips thin, cylindrical, spherical, or easily deformable workpiecesIt is also capable of measuring the size of the workpiece.




Characteristic Motion Examples
Motion to Reduce Impact on the Workpiece
The gripper approaches the workpiece at high speed, then decelerates just before contact to press gently at low speed.



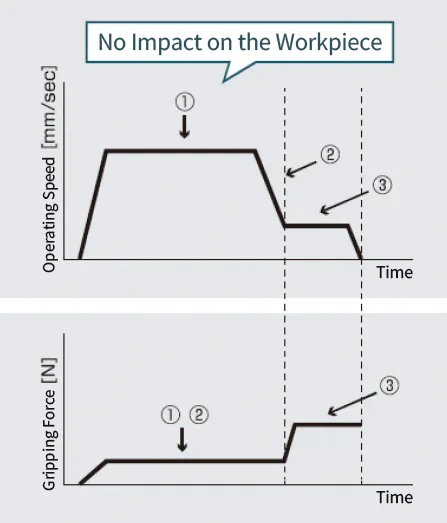
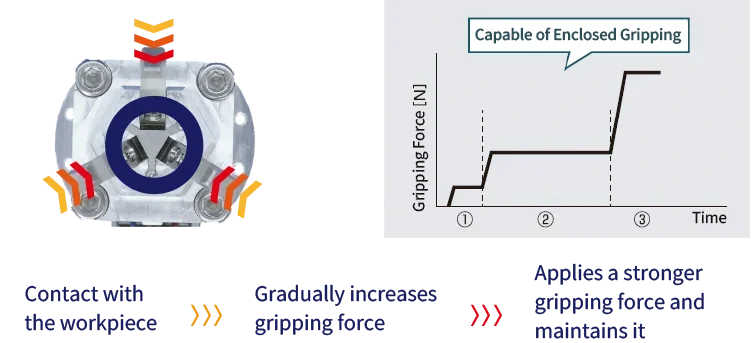
Motion to Adjust Gripping Force After Contact
The pressing force and duration can be freely adjusted to suit the application.
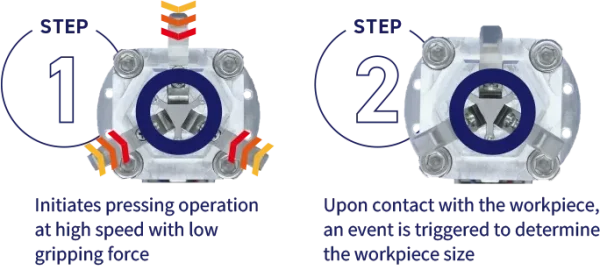
Motion for Measuring Workpiece Size
By transmitting event information at the moment of contact and the gripper’s position data to the host system, the size of the workpiece can be measured.
Fingertips Can Be Replaced by the Customer. Optional fingertip designs are also available upon request.
Fingertip Replacement Process

Current Fingertip Variations
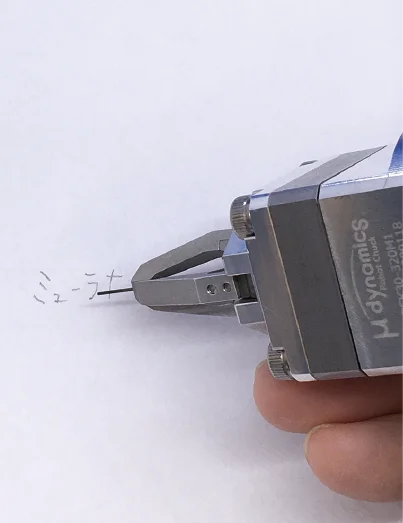
Writing with a 0.5mm Mechanical Pencil Lead
Specifications
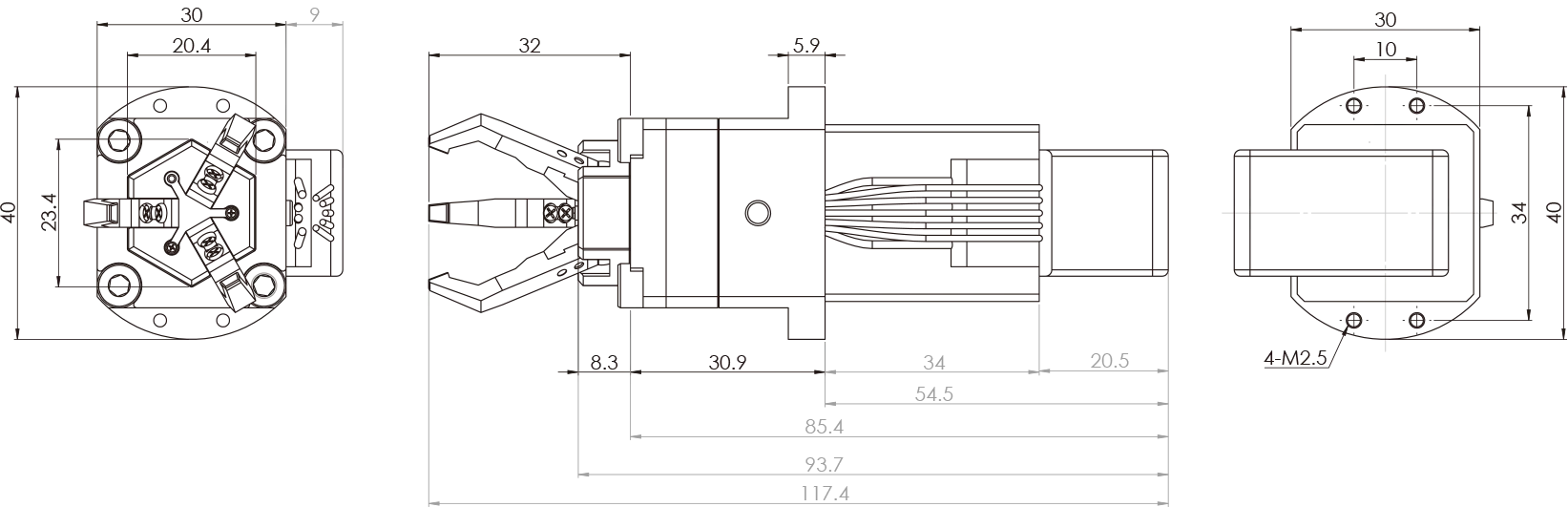
Dimensions
- Total Length〔mm〕
- 117.4
- Cam Section Diameter〔mm〕
- □20
- Reducer Section Diameter〔mm〕
- □30
- Motor Size Diameter mm〕
- □30
- Weight 〔g〕
- 300
Performance
- Maximum Gripping Force〔N〕
- 20
- Repeatability 〔mm〕 Single Side
- ±0.01
- Backlash 〔mm〕 Single Side
- 0.25 or less
- Stroke 〔mm〕Both Sides (Diameter)
- φ2~40
- Maximum Speed〔mm/s〕Both Sides (Diameter)
- 150
- Minimum Incremental Movement〔mm〕Both Sides (Diameter)
- 0.01
Glossary of Technical Terms
- Maximum Gripping Force
- The maximum force applied to the workpiece when all three jaws are in contact. Value shown is the gripping force of one jaw.
- Repeatability (Positioning Accuracy)
- The amount of deviation when positioning repeatedly from the same direction to the same location. Measured under constant temperature and load.
- Backlash
- The play or looseness of the jaws when the motor shaft is held fixed.
- Stroke
- The maximum distance the jaws can open and close.
- Maximum Speed
- The highest speed at which the jaws can open and close.
- Minimum Incremental Movement
- The minimum movement per pulse as set at the time of shipment.