小型・軽量・高出力で超精密動作を可能にした電動グリッパ
強力20Nの把持力、精密φ0.5mmのつかみ動作
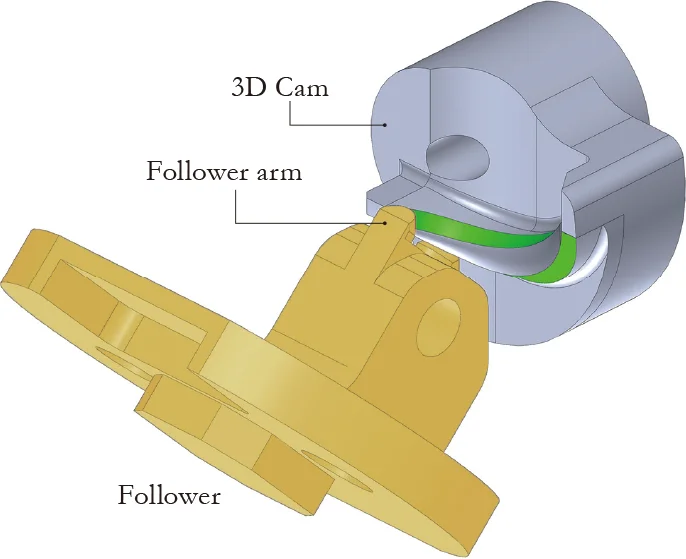
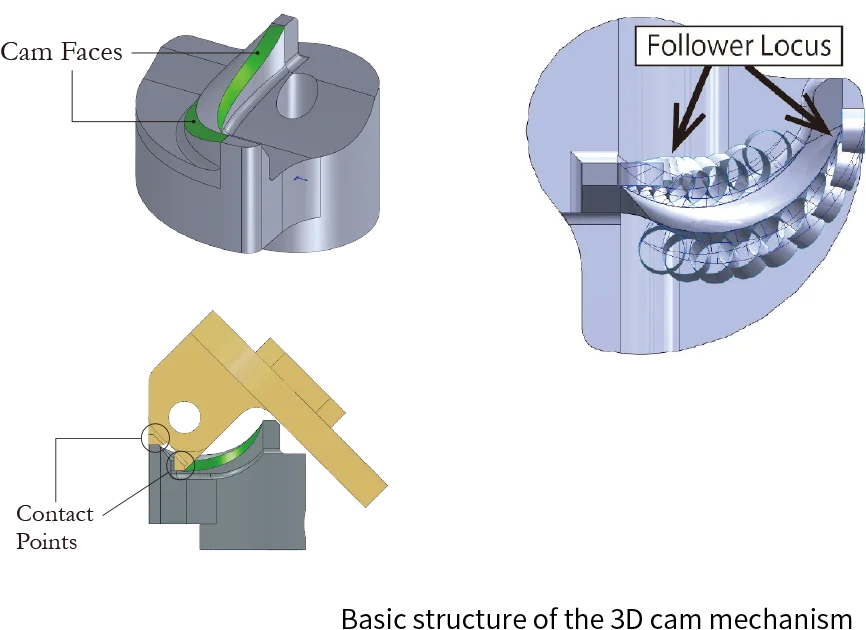
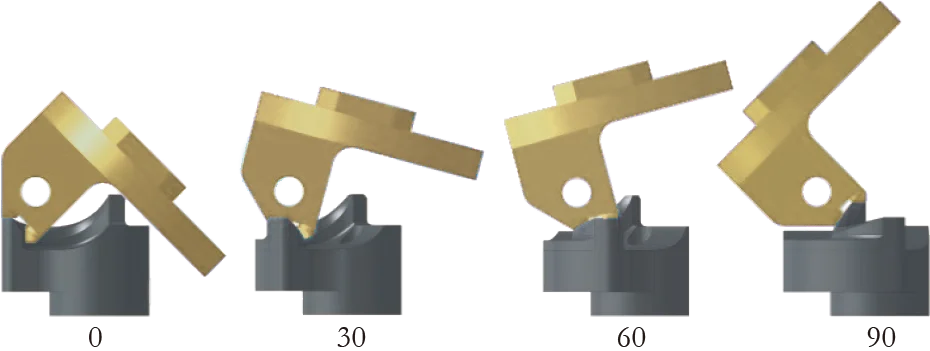
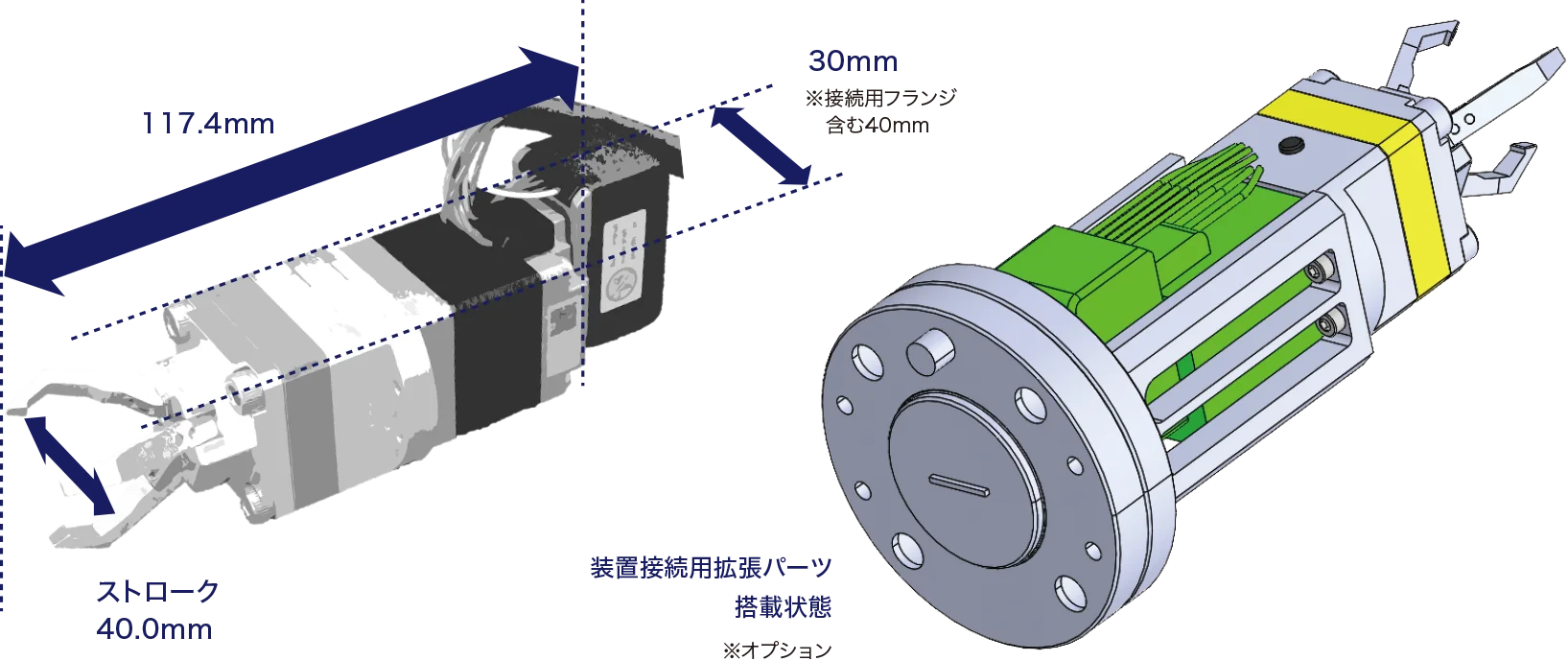
新しい機構である立体カム機構とクラウン減速機を搭載し、小型・軽量なボディでも20Nまでの把持力とφ0.5mmのシャープペンシルの芯をつかむなどの精密な動作ができる電動グリッパです。さらに、アーム支点より回転開閉できる機構であるため、爪先は、開時は本体より大きく、閉時は本体より小さくすることが可能です。
把持位置指令無しのつかみ動作
オリエンタルモーター製AZシリーズモーターの制御機能を活用し、爪先開閉範囲の中であれば、把持位置の指令無しで物を把持することが可能です。ご希望により使用モータを変更することが可能です。

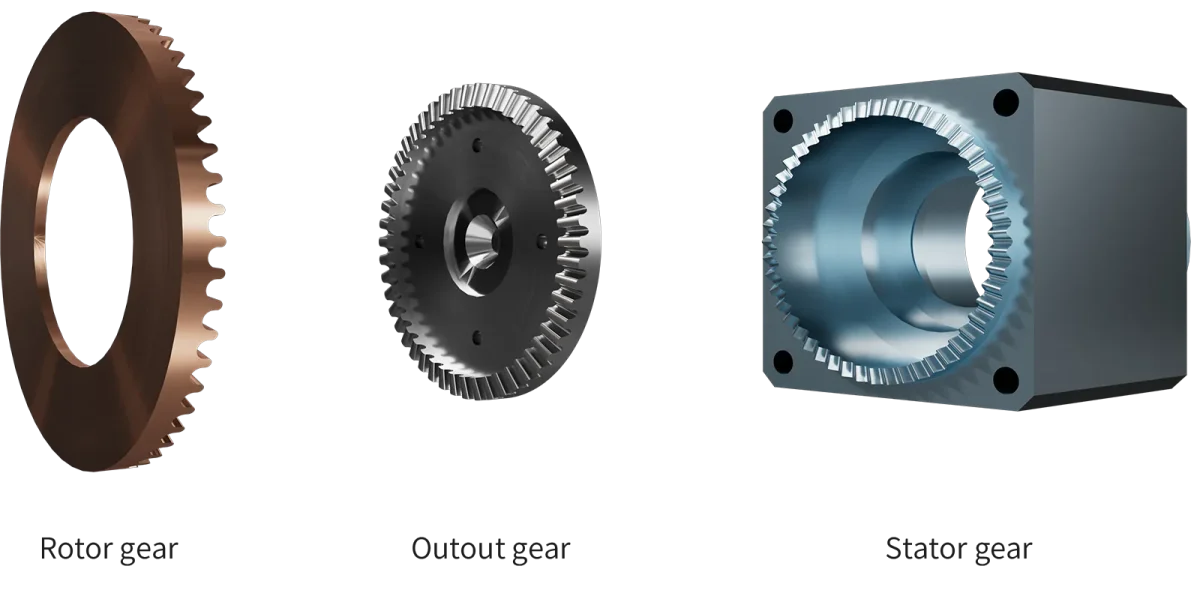
20mm角の立体カム機構と30mm角のクラウン減速機を組み合わせることで小型化を実現。
可動部のストロークは40mmを確保しています。
細いワーク、円柱・円筒・球状のワーク、変形しやすいワークを確実に把持しますワークサイズの測定も可能




特徴的な動作例
ワークへの衝撃を抑える動作
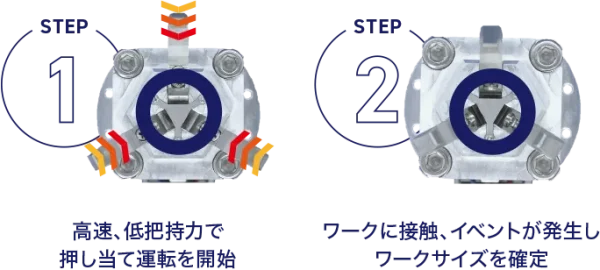
高速でワークに接近。当たる直前に減速をして、低速で押し付けることができます。


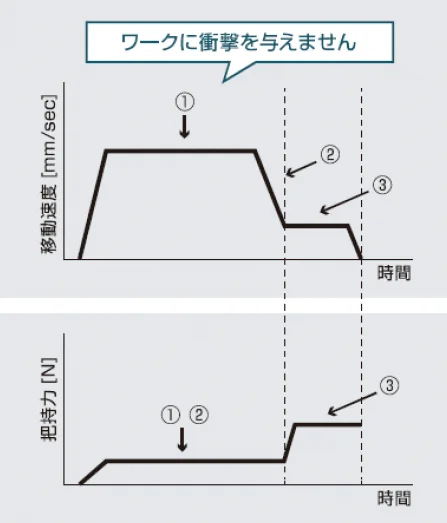
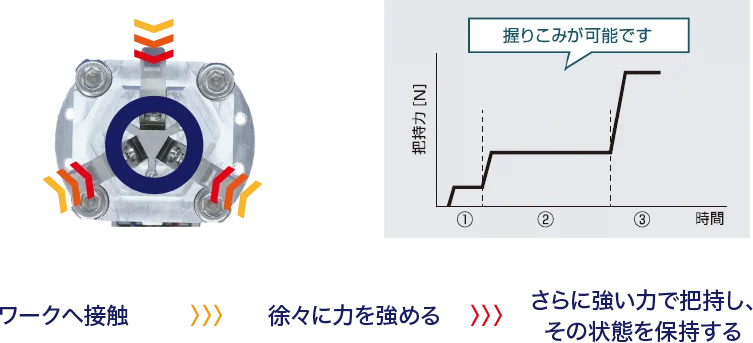
ワークに触ってから把持力を調整する動作
押し当て力と時間を自由に変更することができます。
ワークサイズを測定する動作
接触時のイベント情報と電動グリッパの座標情報を上位システムに渡すことでワークの測定ができます
爪先はお客様にて交換が可能です。オプション対応も致します。
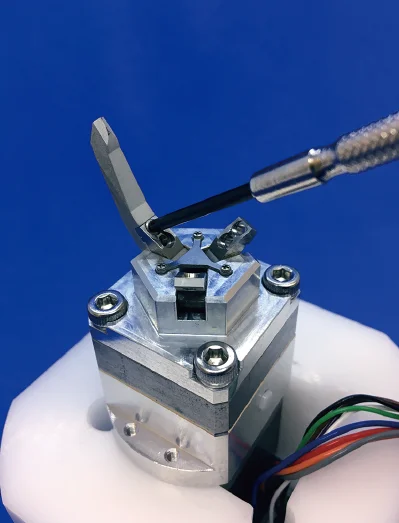
爪交換の様子

現時点での爪のバリエーション
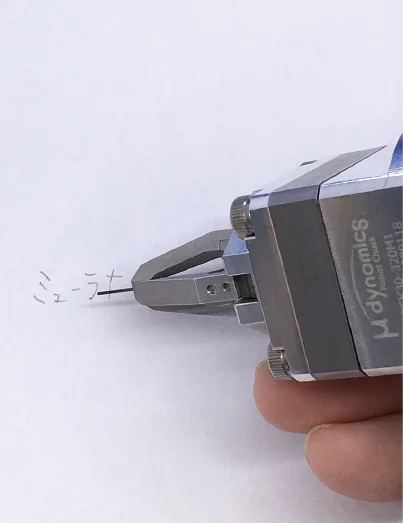
φ0.5mmシャープ芯で字を書いた様子
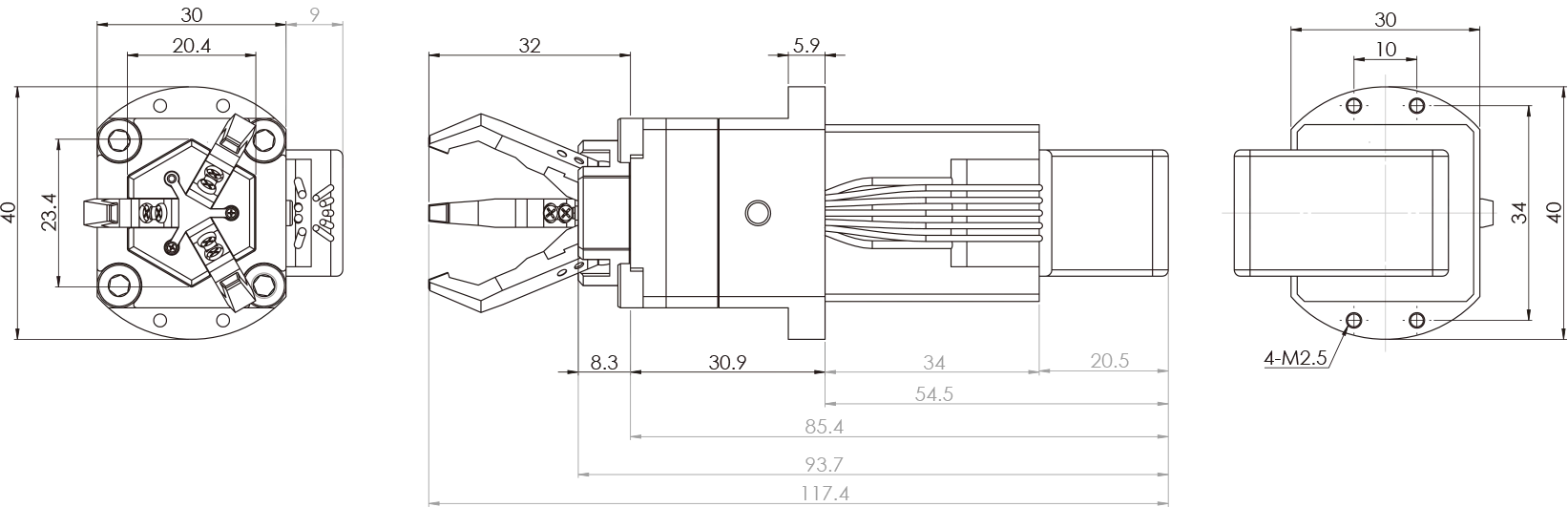
仕様
外形
- 全長〔mm〕
- 117.4
- カム部径〔mm〕
- □20
- 減速機部径〔mm〕
- □30
- モーターサイズ径〔mm〕
- □30
- 重量〔g〕
- 300
性能
- 最大把持力〔N〕
- 20
- 繰り返し位置決め精度〔mm〕片側
- ±0.01
- バックラッシュ〔mm〕片側
- 0.25 以下
- ストローク〔mm〕両側(直径)
- φ2~40
- 最高速度〔mm/s〕両側(直径)
- 150
- 最小移動量〔mm〕両側(直径)
- 0.01
仕様表の用語
- 最大把持力
- ワークを把持する最大の力(3つの爪がすべてのワークに接している状態での1つの爪の把持力)
- 繰り返し位置決め精度
- 同じ位置に同じ方向から繰り返し位置決めをおこなったときに、どれだけの 誤差が生じるかを表した値(精度は一定温度、一定負荷での値)
- バックラッシュ
- モーター軸を固定した時の爪の遊び
- ストローク
- 爪が開閉できる最大の距離
- 最高速度
- 爪が開閉できる最高の速度
- 最小移動量
- 出荷時に設定されている1パルスあたりの移動量